

Hoi! I’m a PhD Student within the Dynamics Design Group at Ghent University advised by Tom Lefebvre and Guillaume Crevecoeur. I’m endlessly intrigued by the unreasonable effectiveness of mathematics in explaining and shaping the world around us. My research broadly focuses on decision-making under uncertainty for robots, integrating ideas from machine learning, modeling, control, and numerical optimization. More recently, I’ve been especially interested in the problem of contact-implicit planning by bridging techniques from classical optimal control and reinforcement learning. I aim to develop principled methods that translate to real-world, human-centered applications.
I haven’t always operated at this scale, though. Before diving into the messy, contact-rich world of robotics, I worked in the realm of sub-micrometer precision as a Systems Engineer at Sioux Technologies. There, I had the privilege of contributing to the engineering wizardry behind ASML’s EUV lithography systems, arguably the most complex mechatronic marvels humanity has ever designed. Trading nanometers for millimeters has been a shift, but whether it’s printing chips or helping robots navigate a room, the thrill of taming physics remains the same.
Beyond research, I care deeply about democratizing knowledge and reducing barriers to access and understanding. When I’m not geeking out over robotics, you’ll likely find me cooking, cycling, woodworking, or spiraling down the rabbit hole of random YouTube videos.
- Will be attending the Reinforcement Learning Summer School this year.
- Our late breaking result got accepted to ECC 2026.
- Our short paper got accepted to Free Energy Principle Workshop at ECC 2026.
- Our short paper got accepted to Frontiers of Optimization for Robotics Workshop at ICRA 2026.
- Our paper Unifying Entropy Regularization in Optimal Control: From and Back to Classical Objectives via Iterated Soft Policies and Path Integral Solutions got accepted to IFAC 2026.
- Attended the Winterschool on Contraction Theory — DISC Winterschool 2026.
- Abstract "Consolidating Probabilistic Optimal Control" accepted for presentation at Benelux Meeting 2026.
Consolidating Probabilistic Optimal Control

When I dove into the current landscape of probabilistic optimal control, I saw a lot of brilliant but isolated crowds. We have Control-as-Inference, Risk-Sensitive Control, Entropy-Regularized RL, and Distributionally Robust Control, all growing into rich parallel directions. But somewhere, somehow, I feel like these are just distant cousins stuck in their own silos, speaking different dialects of the same math. Would be nice is to bring these cousins together for a massive family reunion. I'm trying to build a unifying framework that invites everyone to the same table, breaking down the walls so we can finally see how they relate.
Planning through Contact by smoothing the rough edges

When robots interact with the real world e.g. pushing boxes, walking on gravel, or sliding objects, their physics gets messy. In math terms, it gets "non-smooth," full of sudden impacts and friction that break traditional optimal control algorithms.
A classic standoff in robotics:
Optimal Control: techniques are incredibly efficient and precise. They love smooth curves but completely panic when they hit a "sharp corner" like a contact event, because their gradients basically disappear or explode.
Reinforcement Learning: techniques don't care about smooth gradients. They learn by trying everything (stochasticity), effectively averaging over the bumps to find a solution. It works surprisingly well on rough terrain, but it’s "sample hungry" i.e. it takes forever to learn simple tasks because it’s flying blind without derivative information.
I'm working on methods that take the stochastic "swagger" of RL (randomized smoothing) and inject it into the structured "brains" of Optimal Control. By adding noise and scheduling it appropriately, we can "smooth out" those sharp contact events, tricking the efficient solvers into working on rough problems. This way, we can get the best of both worlds: the efficiency of optimal control and the smoothening effect of RL, enabling robots to plan through contact without needing millions of trials.

A Comparative Study of Smoothing-Based Local Trajectory Optimization Methods for Non-Smooth Robotic Tasks
IROS, 2026. Under Review.
[video]
Online Estimation of Impedance Parameters for a Variable Impedance Controlled Robotic Manipulator
IFToMM ITALY, 2018.
[paper]
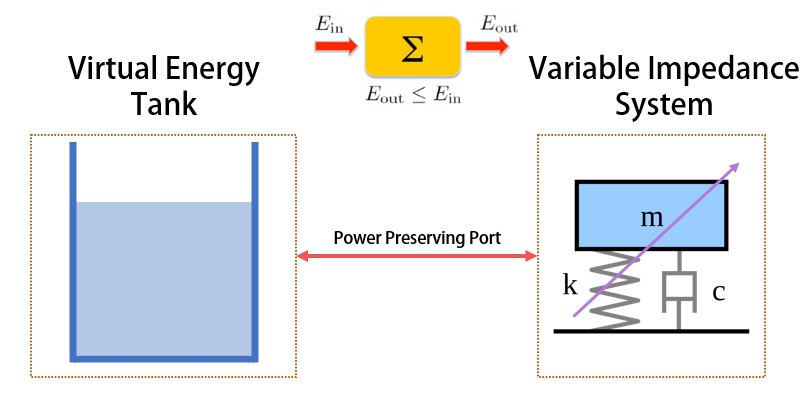
(Internship) Energy based approach for Variable Impedance Control of Robotic Manipulators
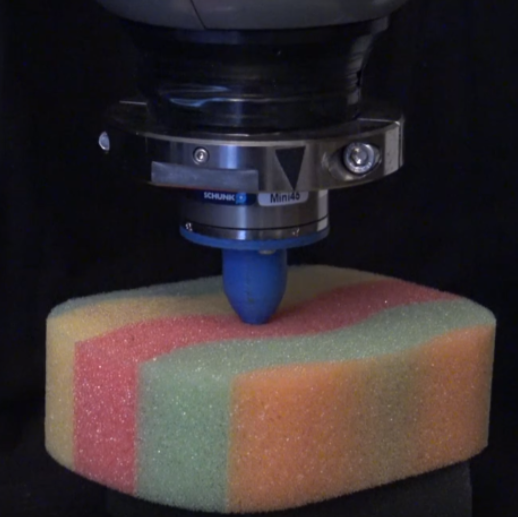
How do you ensure a robot is stiff enough to be precise, but compliant enough to be safe around humans? In this project, I implemented Energy-Based Impedance Control. By introducing a virtual "energy tank" into the control loop, I could regulate the system's dynamics to ensure the robot remains passive, and therefore stable, during interaction. This approach allows us to vary the robot's stiffness in real-time, useful for tasks like needle insertion where the resistance of the tissue changes constantly.
Files: Internship Report
Video: Energy Tank Control Demo
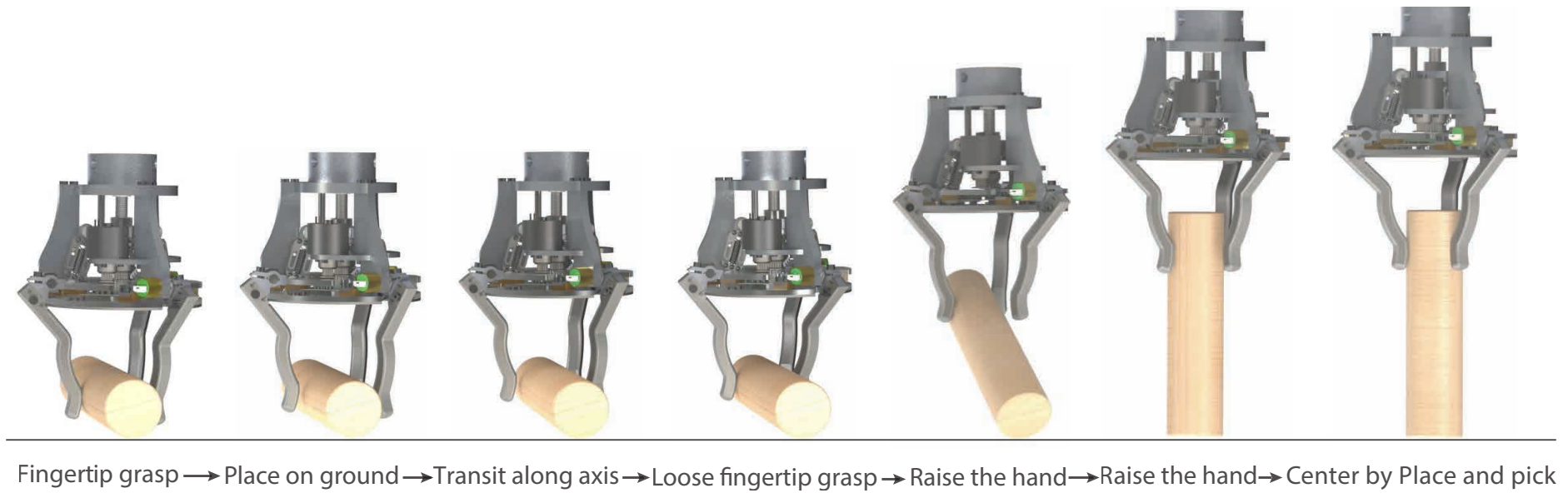
(Study Project) In Hand Manipulation using Extrinsic Dexterity
"The dexterity of the hand is mostly about the brain and not the hand." — Matt Mason
Extrinsic Dexterity is the art of manipulating objects not just with fingers, but by using the environment itself. I modeled the complex friction mechanics involved in pushing a grasped object against external surfaces (a "quasi-static action") to reorient it. Using a Mixed-Linear Complementarity Problem formulation, I could predict exactly how much force was needed to break the grasp equilibrium and slide the object into a new pose.
Files: Report
On Extrinsic Dexterity: MCube Lab
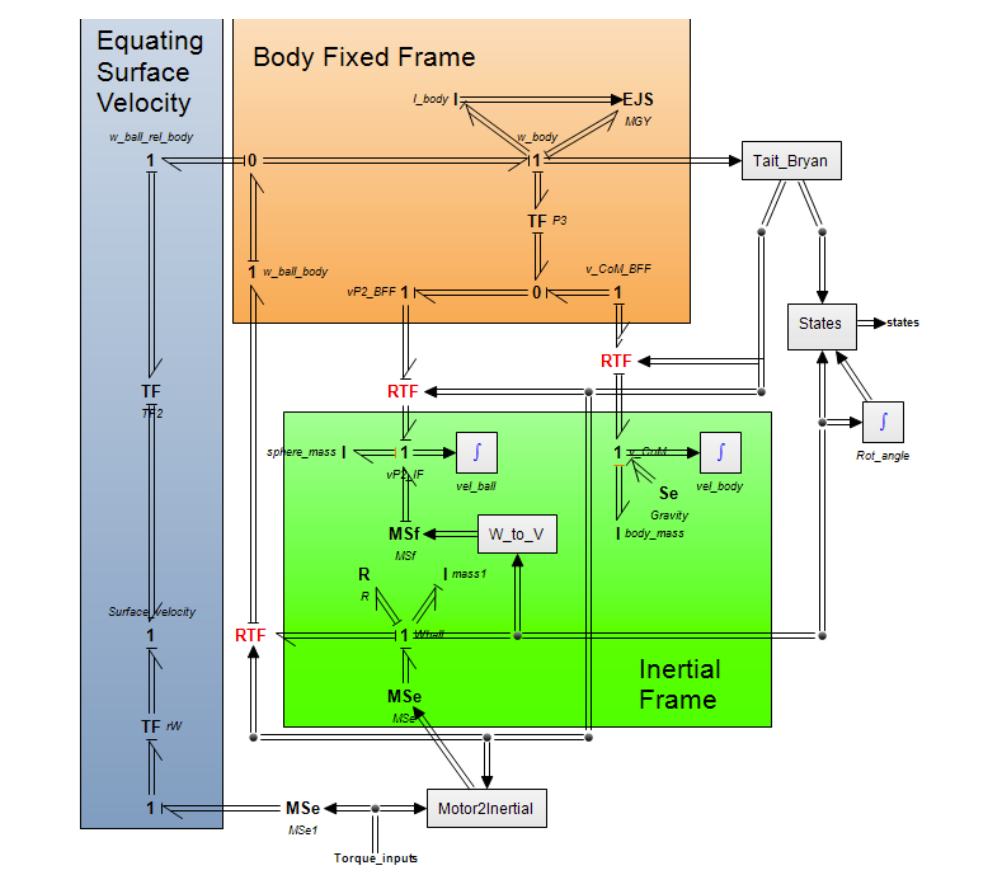
(Study Project) Bond-Graph based Modeling and Simulation of BallBot
Most robots rely on stable wheelbases; the BallBot relies on active control. It is a robot that balances on a single spherical wheel, actuated by three omniwheels, effectively functioning as a 3D inverted pendulum. I explored two aspects: modeling this highly unstable, multi-degree-of-freedom system using Bond-Graphs, and developing a control strategy to keep it upright and mobile.
Files: Report
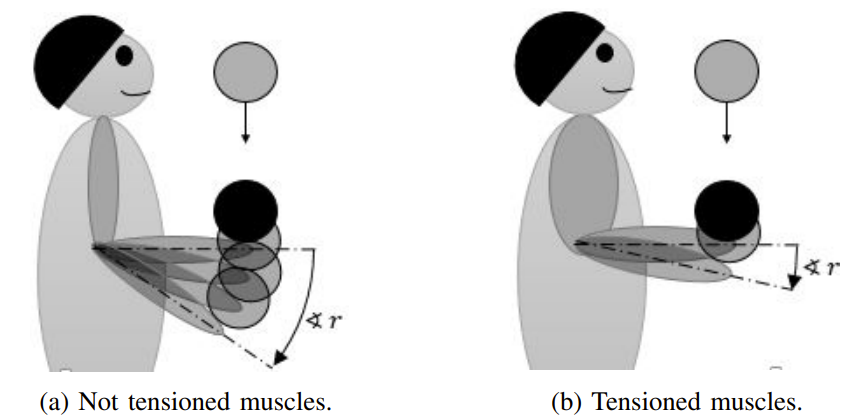
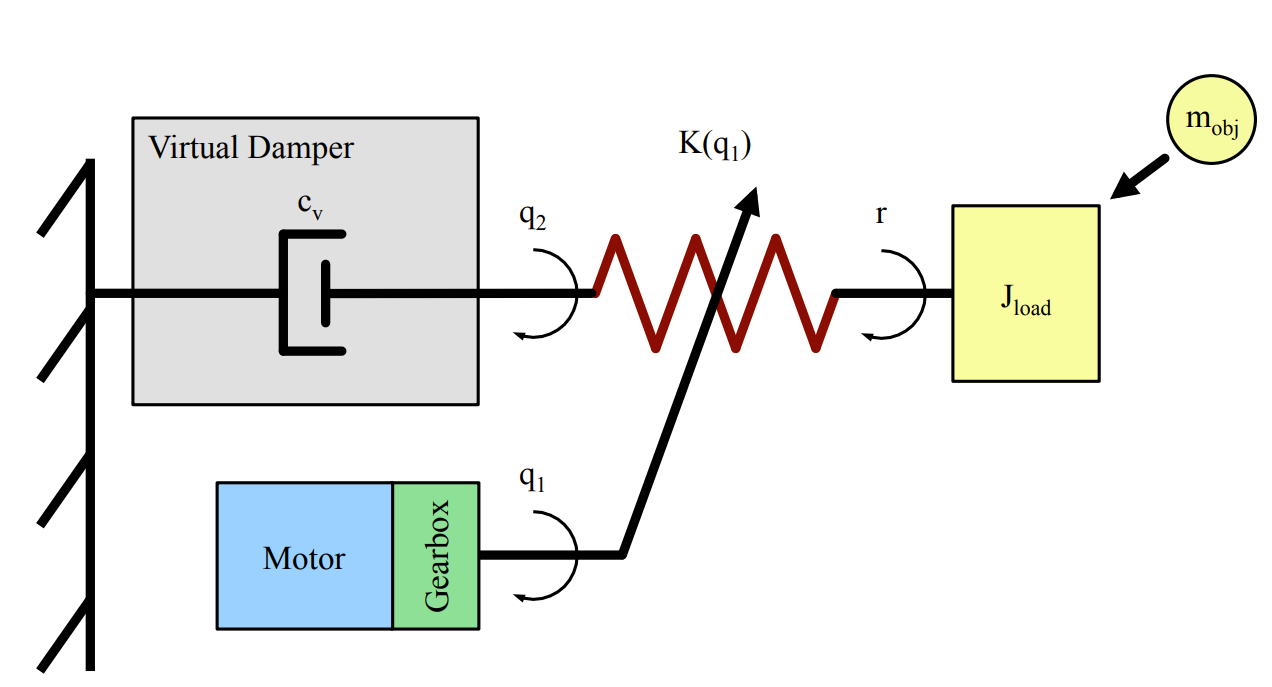
(Study Project) Optimal Control of Variable Stiffness Actuator for a Catching Task
Humans don't move with constant rigidity; we stiffen our muscles to lift heavy loads and relax them for fast, fluid motion. This project applied that biological principle to robotics through Variable Stiffness Actuators (VSAs). I conducted a review of optimal control strategies for these actuators and simulated their performance in dynamic tasks, such as catching a ball, where the robot must instantly optimize its stiffness to absorb impact energy efficiently.
Files: Report

(Design Project) Design, Manufacture and Control of a Stewart Platform
This project was a complete "design-to-build" journey for a 6-DOF Stewart Platform, the classic parallel manipulator used in flight simulators. I handled the kinematic analysis and simulation, but also the manufacturing process flow to fabricate the actual hardware. To interface with the machine, I developed a custom Graphical User Interface (GUI) in Processing, allowing for intuitive manual control of the platform's orientation.
Files: Report
Video: Demo
(Competition) Transporter
For the Transporter event at IIT Kharagpur, I designed an autonomous robot challenged with a complex logistics problem: navigating a grid to detect blocks and deposit them into specific pits while avoiding obstacles. The "brain" of the robot relied on Dijkstra’s Algorithm for shortest-path planning around hazards and the Hungarian Algorithm to optimize the assignment of blocks to pits, ensuring the most efficient route possible.
Video: In Action

(Competition) Robocon
As the Mechanical Lead for Team Robocon BITS Pilani, I was tasked with building a robot capable of playing a competitive game of Badminton Doubles. We focused on a design that prioritized agility and speed. The robot featured a 3-DOF holonomic drive (using omni-wheels) to strafe across the court, coupled with a high-speed Pneumatic Rotary Actuator for the racquet, allowing it to execute quick, powerful swings.
Video: Shuttle Dispensing Mechanism
Video: BITS Pilani vs LJIET A’BAD
Video: BITS Pilani vs PCCOE 2

Towards KriCatch — A Slip Catching Practice System for the Game of Cricket
Master's Thesis — 2018. University of Twente
KriCatch 1.0 is the result of the first design iteration for a slip-catching practice system tailored for cricket. The thesis covers design choices, system capabilities, and evaluations demonstrating improved practice versatility and realism compared to traditional setups.

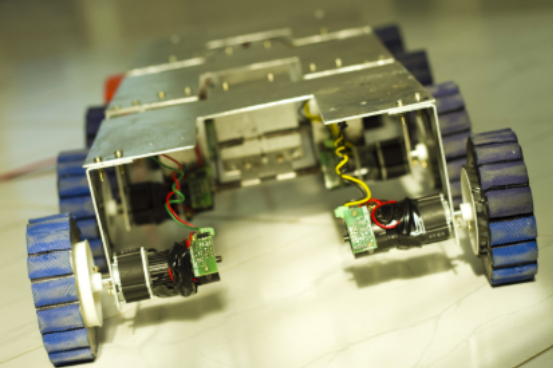
Design of a Robust Stair Climbing Compliant Modular Robot to Tackle Overhang on Stairs
Bachelor's Thesis — 2016. BITS Pilani - Pilani Campus
This work discusses the concept and parameter design of a robust stair-climbing compliant modular robot, capable of tackling stairs with overhangs. Geometry modifications of the periphery of the wheels help in tackling overhangs. Grey-based Taguchi methods were applied to provide optimal settings for design parameters; a prototype demonstrates successful performance.
Short ongoing collection of learnings and articles from my PhD — work in progress.
There a heartbeat to it? March 26, 2026
At a recent lab dinner, I ended up sitting next to my advisor, Guillaume. Instead of the usual shop talk, we got to chatting about a songwriting course he recently took.
When I asked him how it went, he brought up something beautiful the instructor had shared about the creative process: You know a song is ready when it has a heartbeat.
He mentioned how much that idea resonated with him, especially when it comes to writing a really good research paper. It’s like a painting. You write, you edit, you step back, and it feels complete the moment you sense that it has a heartbeat.
Now, I know it’s an incredibly romanticized way to look at academic writing. Most of our day-to-day is doing math, fighting with code and simulators, battling LaTeX formatting, and bracing for Reviewer 2. Look at this idea however you want: either it’s a way to use weaponized delusion to ethically gaslight yourself into feeling inspired, or it’s a genuine reminder of what we’re actually trying to do.
Honestly, I think it’s a great lens to occasionally view our work through. We aren’t just dumping theorems and simulation plots onto a page; we’re trying to build a narrative. And maybe striving for that “heartbeat”, that moment the whole system clicks and the paper comes alive, is exactly what makes the grind worth it.
K, byeeee.
Course: 2025 Numerical Optimization at University of Ghent
As a Teaching Assistant, I cover the foundations of optimal control and various derivative-based and derivative-free algorithms. To bridge theory and practice, I designed a course project: Control as Optimization for Robotic Manipulators (goal is to formulate manipulator control as a multi-objective optimization problem, balancing minimum effort with maximum dexterity. The project explores trade-offs in both redundant and non-redundant systems, requiring students to implement custom solvers to handle kinematic constraints and trajectory tracking). Feel free to adopt this project for your own course and reach out if you'd like the code or materials.